[미션] 물체 앞에서 정지하기

이번 미션은 초음파 센서를 이용한다.

빨간색이라 음...... 가까이 가면 물건을 잡는 브릭으로 내리 찍을거 같은 느낌이 난다. 뭐 어쨋든 제법 로봇처럼 느껴진다.
[블록코드]


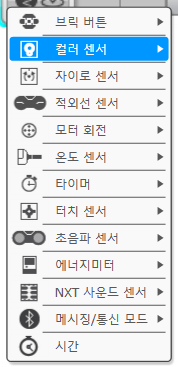
이렇게 펼쳐 보니 입력값으로 사용할 수 있는 것들이 많다. 어쨋든 '거리가 11만큼 감소하면' 과 '거리가 6만큼 증가하면'으로 해석하면 된다. 처음 시도할때 물체와의 거리가 11인 지점에서 멈출거라 생각했는데, 동작을 해보고 나서 정확하게 알았다. 그리고 거리를 비교 연산자를 이용하여 거리가 11인 지점에서 멈추게 할려고 했으나, 계속 모터가 동작했다. 이유는 간단하다. 거리를 판단하는 시점에서 정확하게 11이라고 인식하 수 없기 때문이다. 모터의 동작 힘(속도)이 작을 때는 될지 몰라도, 클때는 안된다.
드디어 로봇 에듀케이터 기초 학습의 마지막인 '브릭 프로그래밍'이 남았다. 그냥 패스^^.
반응형
'레고 > EV3' 카테고리의 다른 글
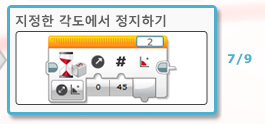
| [EV3 기초] 지정한 각도에서 정지하기 (0) | 2022.02.02 |
|---|---|
| [EV3 기초] 라인에서 정지하기 (0) | 2022.02.02 |
| [EV3 기초] 물체 이동하기 (0) | 2022.02.02 |
| [EV3 기초] 탱크모드로 주행하기 (0) | 2022.02.02 |
| [EV3][파이썬] EV3 파이썬 개발 환경 만들기 (0) | 2022.02.02 |

두리뭉실2:해피파인더그룹
레고가 좋고~ PBL 매력에 빠졌으며~ 취미로 개발하는 두리둥실